|
Smart Minotaur
|
|
Smart Minotaur
|
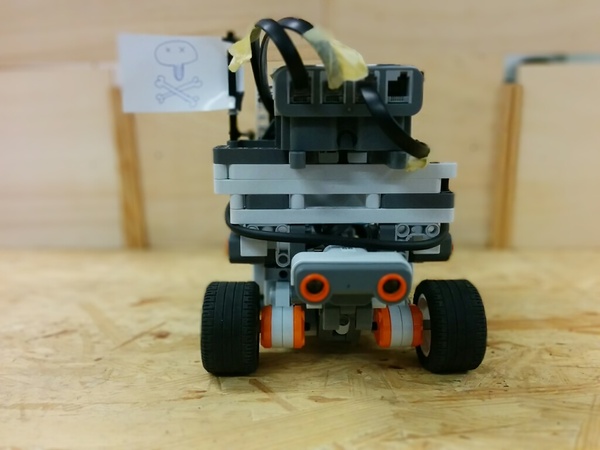
Smart Minotaur ist ein studentisches Projekt, welches im Roboter-Labor der HTWG Konstanz durchgeführt wurde. Ziel war es, einen Roboter zu entwickeln, welcher ein zufälliges Labyrinth kartografiert. Dabei hat der Roboter zu Beginn keinerlei Anhaltspunkte über das Labyrinth.
Als Hardware wird ein Lego NXT Roboter verwendet. Dieser stellt Ultraschallsensoren und Motoren zur Verfügung. Der Lego Roboter ist über USB wiederum an ein Beagle Bone Black (BBB) angeschlossen. Zur Verbesserung der Odometrie des Roboters werden Lasersensoren von Computer-Mäusen verwendet.
Teammitglieder
 1.8.1.2
1.8.1.2 
