|
Smart Minotaur
|
|
Smart Minotaur
|
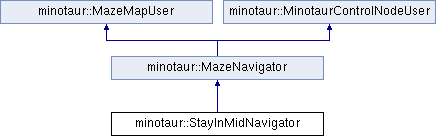
The StayInMidNavigator class is an implementation of the MazeNavigator interface. Mehr ...
#include <StayInMidNavigator.hpp>
Öffentliche Methoden | |
| void | receivedOdometry (const nav_msgs::Odometry &p_odometry) |
| This method is called when an Odometry message is recieved. | |
| void | receivedUltrasonicData (const minotaur_common::UltrasonicData &p_sensorData) |
| This method is called when an UltrasonicData message is recieved. | |
| void | moveToNextNode (const Direction p_currentDirection) |
| Moves the robot straight forward to the next node in the maze. | |
| void | turnRobotTo (const Direction p_currentDirection, const Direction p_newDirection) |
| Turns the robot to the given direction. | |
| void | shutdown () |
| Interrupts the MazeNavigator and shuts it down. | |
Weitere Geerbte Elemente | |
 Geschützte Attribute geerbt von minotaur::MazeMapUser Geschützte Attribute geerbt von minotaur::MazeMapUser | |
| MazeMap * | map |
| Geschützte Attribute geerbt von minotaur::MinotaurControlNodeUser | |
| MinotaurControlNode * | controlNode |
| std::vector< SensorSetting > | sensorSettings |
The StayInMidNavigator class is an implementation of the MazeNavigator interface.
It processes incoming UltrasonicData and Odometry message. Depending on the results the robot tries to stay in the mid between the walls on the left and right when he moves to the next node.
|
virtual |
Moves the robot straight forward to the next node in the maze.
| p_currentDirection | current direction of the robot |
Implementiert minotaur::MazeNavigator.
|
virtual |
This method is called when an Odometry message is recieved.
Processing the message is done here.
| p_odometry | the Odometry message |
Implementiert minotaur::MazeNavigator.
|
virtual |
This method is called when an UltrasonicData message is recieved.
Processing the message is done here.
| p_sensorData | the UltrasonicData message |
Implementiert minotaur::MazeNavigator.
|
virtual |
Interrupts the MazeNavigator and shuts it down.
If the robot is moving the movement is stopped immediatly.
Implementiert minotaur::MazeNavigator.
|
virtual |
Turns the robot to the given direction.
| p_currentDirection | current direction of the robot |
| p_newDirection | target direction to which the robot is turned |
Implementiert minotaur::MazeNavigator.
 1.8.1.2
1.8.1.2 
