|
Smart Minotaur
|
|
Smart Minotaur
|
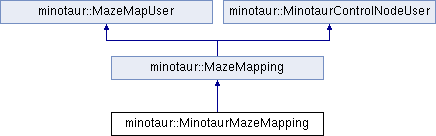
The MinotaurMazeMapping class is an implementation of the MazeMapping interface. Mehr ...
#include <MinotaurMazeMapping.hpp>
Öffentliche Methoden | |
| void | receivedUltrasonicData (const minotaur_common::UltrasonicData &p_sensorData) |
| This method is called when an UltrasonicData message is recieved. | |
| void | mapNode (const unsigned int p_x, const unsigned int p_y, const Direction p_direction) |
| Signals that the node at the given position should be mapped. | |
Weitere Geerbte Elemente | |
 Geschützte Attribute geerbt von minotaur::MazeMapUser Geschützte Attribute geerbt von minotaur::MazeMapUser | |
| MazeMap * | map |
| Geschützte Attribute geerbt von minotaur::MinotaurControlNodeUser | |
| MinotaurControlNode * | controlNode |
| std::vector< SensorSetting > | sensorSettings |
The MinotaurMazeMapping class is an implementation of the MazeMapping interface.
It processes incoming UltrasonicData messages and calculates the blocked properties of the MazeNode, in which the robot currently is in. The robot is not moving during this procedure.
|
virtual |
Signals that the node at the given position should be mapped.
The method updates the MazeMap at that position.
| p_x | current x position of the robot |
| p_y | current y position of the robot |
| p_direction | current direction of the robot |
Implementiert minotaur::MazeMapping.
|
virtual |
This method is called when an UltrasonicData message is recieved.
Processing the message is done here.
| p_sensorData | the UltrasonicData message |
Implementiert minotaur::MazeMapping.
 1.8.1.2
1.8.1.2 
