|
Smart Minotaur
|
|
Smart Minotaur
|
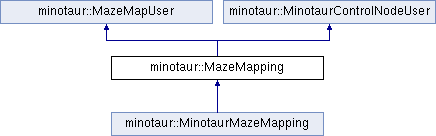
The MazeMapping class provides an interface for the mapping of a MazeSolver object and determines in which directions a MazeNode is blocked or not. Mehr ...
#include <MazeMapping.hpp>
Öffentliche Methoden | |
| virtual void | receivedUltrasonicData (const minotaur_common::UltrasonicData &p_sensorData)=0 |
| This method is called when an UltrasonicData message is recieved. | |
| virtual void | mapNode (const unsigned int p_x, const unsigned int p_y, const Direction p_direction)=0 |
| Signals that the node at the given position should be mapped. | |
 Öffentliche Methoden geerbt von minotaur::MazeMapUser Öffentliche Methoden geerbt von minotaur::MazeMapUser | |
| void | setMazeMap (MazeMap *p_map) |
| Öffentliche Methoden geerbt von minotaur::MinotaurControlNodeUser | |
| void | setMinotaurControlNode (MinotaurControlNode *p_controlNode) |
Weitere Geerbte Elemente | |
| Geschützte Attribute geerbt von minotaur::MazeMapUser | |
| MazeMap * | map |
| Geschützte Attribute geerbt von minotaur::MinotaurControlNodeUser | |
| MinotaurControlNode * | controlNode |
| std::vector< SensorSetting > | sensorSettings |
The MazeMapping class provides an interface for the mapping of a MazeSolver object and determines in which directions a MazeNode is blocked or not.
|
pure virtual |
Signals that the node at the given position should be mapped.
The method updates the MazeMap at that position.
| p_x | current x position of the robot |
| p_y | current y position of the robot |
| p_direction | current direction of the robot |
Implementiert in minotaur::MinotaurMazeMapping.
|
pure virtual |
This method is called when an UltrasonicData message is recieved.
Processing the message is done here.
| p_sensorData | the UltrasonicData message |
Implementiert in minotaur::MinotaurMazeMapping.
 1.8.1.2
1.8.1.2 
