|
Smart Minotaur
|
|
Smart Minotaur
|
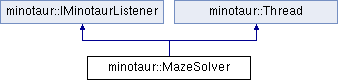
The MazeSolver class runs all logic for solving a maze. Mehr ...
#include <MazeSolver.hpp>
Öffentliche Methoden | |
| MazeSolver (const MazeSolverConfig &p_config) | |
| void | run () |
| The content of this method is executed in the thread. | |
| void | pause () |
| Pauses the object from solving the maze. | |
| void | resume () |
| Resumes the solving of the maze if it was pause. | |
| const MazeMap & | getMap () const |
| MinotaurControlNode & | getControlNode () |
| void | onReceiveOdometry (const nav_msgs::Odometry &p_odometry) |
| This method is called when an incoming Odometry message is received. | |
| void | onReceiveUltrasonicData (const minotaur_common::UltrasonicData &p_sensorData) |
| This method is called when an incoming UltrasonicData message is received. | |
 Öffentliche Methoden geerbt von minotaur::Thread Öffentliche Methoden geerbt von minotaur::Thread | |
| void | start () |
| void | stop () |
| void | join () |
Geschützte Methoden | |
| void | onStart () |
| This method is called before the thread is started (call of start()). | |
| void | onStop () |
| This method is called when stop() is called. | |
The MazeSolver class runs all logic for solving a maze.
Its behaviour can be changed by implementing the MazeNavigator, MazeMapping and ExplorationAlgorithm interfaces. These have to be set using a MazeSolverConfig object.
The configuration of a MazeSolver object can only be set at construction. Afterwards the configuration is not changeable anymore.
|
virtual |
This method is called when an incoming Odometry message is received.
| p_odometry | the incoming Odometry message |
Implementiert minotaur::IMinotaurListener.
|
virtual |
This method is called when an incoming UltrasonicData message is received.
| p_sensorData | the incoming UltrasonicData message |
Implementiert minotaur::IMinotaurListener.
|
protectedvirtual |
This method is called before the thread is started (call of start()).
Any adjustments of members should be done here.
Implementiert minotaur::Thread.
|
protectedvirtual |
This method is called when stop() is called.
The correct stopping of the thread should be done here (e.g. set a bool to false).
Implementiert minotaur::Thread.
|
virtual |
The content of this method is executed in the thread.
All work done by the thread should be implemented here.
Implementiert minotaur::Thread.
 1.8.1.2
1.8.1.2 
